ステッピングモータは、電気パルス信号を機械的に断続するステップ動作に変換する電気・機械変換装置で す。電気的な指令パルス信号が適切な順序で与えられると、モータ軸は断続的なステップ増加分に応じて回転し ます。モータ回転と与えられた入力パルスとの間には、いくつか直接的な関係があります。与えられたパルスの 順序はモータ軸の回転方向、モータ軸の回転速度は入力パルスの周波数、
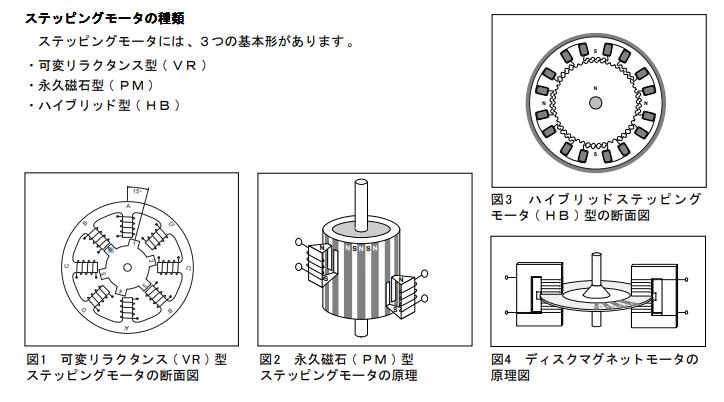
モータ軸の回転角度は与えられた入力 パルスの数とそれぞれ直接関係しています。 ステッピングモータの長所と短所 長所 1.モータの回転角度は、入力パルスに比例する。 2.静止状態でトルクが最大になる(巻線に通電している場合)。 3.良いステッピングモータは、ステップ角毎の誤差は±3~5%の精度を持ち、この誤差はステップ間で 累積しないため、高精度な位置決めと動作の反復性を持つ。 4.始動/停止/逆転に対する優れたレスポンスを有する。 5.モータ内に接触ブラシがないため、非常に信頼性が高い。このため、モータの寿命は軸受けの寿命にのみ 依存する。 6.モータはオープンループ制御が可能なデジタル入力パルスに応答することから、モータ制御がより容易 かつ低コストになる。 7.軸と直接連結された負荷とは、超低速な同期運転が可能になる。 8.回転速度は入力パルスの周波数に比例するため、広範囲の回転速度を実現できる。 短所 1.制御が不適切な場合、共振が発生することがある。 2.超高速での運転は容易でない。 オープンループ動作 ステッピングモータの最も重要な長所の1つとして、オープンループで正確に制御可能である点が挙げられま す。この場合のオープンループ制御とは、位置に関してフィードバックする情報が必要ないことを意味します。 この制御方法により、光エンコーダなど高価な検出装置やフィードバック装置は必要なくなります。また、入力 ステップパルスの状況を把握するだけで、位置を知ることが可能です。 ステッピングモータの種類 ステッピングモータには、3つの基本形があります。 ・可変リラクタンス型(VR) ・永久磁石型(PM) ・ハイブリッド型(
HB Stepper Motor)